Такой ШИМ регулятор может быть применен для управления мощными нагрузками, в том числе и низковольтными электродвигателями.Сегодня постараюсь сделать небольшой поверхностный обзор этого чудо-модуля и показать основные части и принцип работы.
Произведено естественно в Китае, жаль, что на плате затерты многие компоненты, хотя итак понятно что к чему.
Шим регулятор обеспечивает плавную регулировку мощности, диапазон выходных напряжений 10-50 Вольт, что проверялось неоднократно. Максимальный ток до 60 Ампер, а это дает возможность использовать такую плату для управления (регулировки) оборотов электрокаров, скутеров или велосипедов. Модуль как раз специально заточен для таких целей из-за наличия гасящих диодов, которые предназначены для защиты полевых ключей от самоиндукции двигателя. Для того кто захочет приобрести данный товар, вот ссылка

На плате 12 трехвыводных компонента в корпусе ТО220, у каждого свой теплоотвод, из них 4 являются диодами, а остальные 8 – полевые транзисторы.

Китайские инженеры затерли очень многое на плате, в том числе и полевики (точнее они вообще без маркировки).

Имеется задающий генератор, на выходе которого установлен делитель. Таким образом получено два аналогичных сигнала, которые поступают на двайвера, а их две.

Каждый драйвер управляет линейкой полевиков (4 шт) в итоге силовые выводы всех полеввиков включены параллельно.
Схема очень продуманная, но одного китайцы не учли – не имеется защита от кз на выходе.

Вообще это уже второй подобный модуль у меня, в первом варианте был установлен низкоомный шунт – беседа с продавцом подтвердила, что это токовый шунт, с которого берутся показания для системы защиты, т.е фиксируется падение именно на этом шунте, но когда плата доехала я был в шоке – шунт имеется, но на плате попросту не установлены компоненты схемы защиты, таким образом шунт играет роль банальной перемычки, в итоге эта плата сгорела в один прекрасный миг.

А та плато, о которой сегодня беседуем, пока жива и здорова, но опять же – очень уязвима из-за отсутствия защит.
По схематической части все стандартно – мощный шим регулятор оборотов для движка, важно не превысить максимально допустимое входное напряжение (50 Вольт макс) а то сгорит схема стабилизатора, который обеспечивает питание для шим микросхемы и драйвера.

Регулировать яркость галогенных ламп и других пассивных нагрузок тоже можно без проблем. Проверял регулятор под нагрузкой в 30 Ампер, ключи еле -еле теплые, не смотря на маленькие теплоотводы, хотя это стоило ожидать, ведь шим управление гораздо эффективнее, чем линейное.
ШИМ или PWM (широтно-импульсная модуляция, по-английски pulse-width modulation) – это способ управления подачей мощности к нагрузке. Управление заключается в изменении длительности импульса при постоянной частоте следования импульсов. Широтно-импульсная модуляция бывает аналоговой, цифровой, двоичной и троичной.
Применение широтно-импульсной модуляции позволяет повысить КПД электрических преобразователей, особенно это касается импульсных преобразователей, составляющих сегодня основу вторичных источников питания различных электронных аппаратов. Обратноходовые и прямоходовые однотактные, двухтактные и полумостовые, а также мостовые импульсные преобразователи управляются сегодня с участием ШИМ, касается это и резонансных преобразователей.
Широтно-импульсная модуляция позволяет регулировать яркость подсветки жидкокристаллических дисплеев сотовых телефонов, смартфонов, ноутбуков. ШИМ реализована в , в автомобильных инверторах, в зарядных устройствах и т. д. Любое зарядное устройство сегодня использует при своей работе ШИМ.
В качестве коммутационных элементов, в современных высокочастотных преобразователях, применяются биполярные и полевые транзисторы, работающие в ключевом режиме. Это значит, что часть периода транзистор полностью открыт, а часть периода - полностью закрыт.
И так как в переходных состояниях, длящихся лишь десятки наносекунд, выделяемая на ключе мощность мала, по сравнению с коммутируемой мощностью, то средняя мощность, выделяемая в виде тепла на ключе, в итоге оказывается незначительной. При этом в замкнутом состоянии сопротивление транзистора как ключа очень невелико, и падение на нем напряжения приближается к нулю.
В разомкнутом же состоянии проводимость транзистора близка к нулю, и ток через него практически не течет. Это позволяет создавать компактные преобразователи с высокой эффективностью, то есть с небольшими тепловыми потерями. А резонансные преобразователи с переключением в нуле тока ZCS (zero-current-switching) позволяют свести эти потери к минимуму.

В ШИМ-генераторах аналогового типа, управляющий сигнал формируется аналоговым компаратором, когда на инвертирующий вход компаратора, например, подается треугольный или пилообразный сигнал, а на неинвертирующий - модулирующий непрерывный сигнал.
Выходные импульсы получаются , частота их следования равна частоте пилы (или сигнала треугольной формы), а длительность положительной части импульса связана с временем, в течение которого уровень модулирующего постоянного сигнала, подаваемого на неинвертирующий вход компаратора, оказывается выше уровня сигнала пилы, который подается на инвертирующий вход. Когда напряжение пилы выше модулирующего сигнала - на выходе будет отрицательная часть импульса.

Если же пила подается на неинвертирующий вход компаратора, а модулирующий сигнал - на инвертирующий, то выходные импульсы прямоугольной формы будут иметь положительное значение тогда, когда напряжение пилы выше значения модулирующего сигнала, поданного на инвертирующий вход, а отрицательное - когда напряжение пилы ниже сигнала модулирующего. Пример аналогового формирования ШИМ - микросхема TL494, широко применяющаяся сегодня при построении импульсных блоков питания.

Цифровая ШИМ используются в двоичной цифровой технике. Выходные импульсы также принимают только одно из двух значений (включено или выключено), и средний уровень на выходе приближается к желаемому. Здесь пилообразный сигнал получается благодаря использованию N-битного счетчика.
Цифровые устройства с ШИМ работают также на постоянной частоте, обязательно превосходящей время реакции управляемого устройства, этот подход называется передискретизацией. Между фронтами тактовых импульсов, выход цифрового ШИМ остается стабильным, или на высоком, или на низком уровне, в зависимости от текущего состояния выхода цифрового компаратора, который сравнивает уровни сигналов на счетчике и приближаемый цифровой.
Выход тактуется как последовательность импульсов с состояниями 1 и 0, каждый такт состояние может сменяться или не сменяться на противоположное. Частота импульсов пропорциональна уровню приближаемого сигнала, а единицы, следующие друг за другом могут сформировать один более широкий, более продолжительный импульс.
Получаемые импульсы переменной ширины будут кратны периоду тактования, а частота будет равна 1/2NT, где T – период тактования, N – количество тактов. Здесь достижима более низкая частота по отношению к частоте тактования. Описанная схема цифровой генерации - это однобитная или двухуровневая ШИМ, импульсно-кодированная модуляция ИКМ.
Эта двухуровневая импульсно-кодированная модуляция представляет собой по сути серию импульсов с частотой 1/T, и шириной Т или 0. Для усреднения за больший промежуток времени применяется передискретизация. Высокого качества ШИМ позволяет достичь однобитная импульсно-плотностная модуляция (pulse-density-modulation), называемая также импульсно-частотной модуляцией.
При цифровой широтно-импульсной модуляции прямоугольные подимпульсы, которыми оказывается заполнен период, могут приходиться на любое место в периоде, и тогда на среднем за период значении сигнала сказывается только их количество. Так, если разделить период на 8 частей, то комбинации импульсов 11001100, 11110000, 11000101, 10101010 и т. д. дадут одинаковое среднее значение за период, тем не менее, отдельно стоящие единицы утяжеляют режим работы ключевого транзистора.

Корифеи электроники, повествуя о ШИМ, приводят такую аналогию с механикой. Если при помощи двигателя вращать тяжелый маховик, то поскольку двигатель может быть либо включен, либо выключен, то и маховик будет либо раскручиваться и продолжать вращаться, либо станет останавливаться из-за трения, когда двигатель выключен.
Но если двигатель включать на несколько секунд в минуту, то вращение маховика будет поддерживаться, благодаря инерции, на некоторой скорости. И чем дольше продолжительность включения двигателя, тем до более высокой скорости раскрутится маховик. Так и с ШИМ, на выход приходит сигнал включений и выключений (0 и 1), и в результате достигается среднее значение. Проинтегрировав напряжение импульсов по времени, получим площадь под импульсами, и эффект на рабочем органе будет тождественен работе при среднем значении напряжения.
Так работают преобразователи, где переключения происходят тысячи раз в секунду, и частоты достигают единиц мегагерц. Широко распространены специальные ШИМ-контроллеры, служащие для управления балластами энергосберегающих ламп, блоками питания, и т. д.

Отношение полной длительности периода импульса ко времени включения (положительной части импульса) называется скважностью импульса. Так, если время включения составляет 10 мкс, а период длится 100 мкс, то при частоте в 10 кГц, скважность будет равна 10, и пишут, что S = 10. Величина обратная скважности называется коэффициентом заполнения импульса, по-английски Duty cycle, или сокращенно DC.
Так, для приведенного примера DC = 0.1, поскольку 10/100 = 0.1. При широтно-импульсной модуляции, регулируя скважность импульса, то есть варьируя DC, добиваются требуемого среднего значения на выходе электронного или другого электротехнического устройства, например двигателя.
Широтно - импульсные регуляторы постоянного тока
Необходимость регулировки постоянного напряжения для питания мощных инерционных нагрузок чаще всего возникает у владельцев автомобилей и другой авто-мото техники. Например, появилось желание плавно менять яркость ламп освещения салона, габаритных огней, автомобильных фар или вышел из строя узел регулирования оборотов вентилятора автомобильного кондиционера, а замены нет. Осуществить такое желание иногда нет возможности из-за большого тока потребления этими устройствами - если устанавливать транзисторный регулятор напряжения, компенсационный или параметрический, на регулирующем транзисторе будет выделяться очень большая мощность, что потребует установки больших радиаторов или введения принудительного охлаждения с помощью малогабаритного вентилятора от компьютерных устройств. Выходом из положения является применение широтно - импульсных схем, управляющих мощными полевыми силовыми транзисторами MOSFET . Эти транзисторы могут коммутировать очень большие токи (до 160А и более) при напряжении на затворе 12 - 15 В. Сопротивление открытого транзистора очень мало, что позволяет заметно снизить рассеиваемую мощность. Схемы управления должны обеспечивать разность напряжений между затвором и истоком не менее 12 ... 15 В, в противном случае сопротивление канала сильно увеличивается и рассеиваемая мощность значительно возрастает, что может привести перегреву транзистора и выходу его из строя. Для широтно - импульсных автомобильных низковольтных регуляторов выпускаются специализированные микросхемы, например U 6080B ... U6084B , L9610, L9611, которые содержат узел повышения выходного напряжения до 25 -30 В при напряжении питания 7 -14 В, что позволяет включать выходной транзистор по схеме с общим стоком, чтобы можно было подключать нагрузку с общим минусом, но достать их практически невозможно. Для большинства нагрузок, которые потребляют ток не более 10А и не могут вызвать просадку бортового напряжения можно использовать простые схемы без дополнительного узла повышения напряжения. Такие схемы рассмотрены в этом разделе.
Первый ШИМ регулятор собран на
инверторах логической КМОП
микросхемы. Схема представляет собой генератор прямоугольных
импульсов на двух логических элементах, в котором за счёт диодов
раздельно меняется постоянная времени заряда и разряда
частотозадающего конденсатора, что позволяет изменять скважность
выходных импульсов и значение эффективного напряжения на нагрузке.
В схеме можно использовать любые инвертирующие КМОП элементы, например
К176ПУ2, К561ЛН1, а также любые элементы И, ИЛИ-НЕ, например
К561ЛА7, К561ЛЕ5 и подобные, соответственно сгруппировав их входы.
Полевой транзистор может быть любым из
MOSFET
,
которые выдерживают максимальный ток нагрузки, но желательно
использовать транзистор с как можно большим максимальным током, т.к. у
него меньшее сопротивление открытого канала, что уменьшает рассеиваемую
мощность и позволяет использовать радиатор меньшей площади.
Достоинство схемы - простота и доступность элементов, недостатки - диапазон изменения выходного напряжения чуть
меньше 100% и невозможно доработать схему с целью
введения дополнительных режимов, например плавного автоматического
увеличения или понижения напряжения на нагрузке, т.к. регулирование производится путём изменения
сопротивления переменного резистора, а не изменением уровня
управляющего напряжения.
 Гораздо лучшими характеристиками обладает вторая схема, но количество
элементов в ней чуть больше. Регулировка эффективного значения
напряжения на нагрузке от 0 до 12 В производится изменением
напряжения на управляющем входе от 8 до 12 В. Диапазон
регулировки напряжения практически 100%. Максимальный
ток нагрузки полностью определяется типом силового полевого
транзистора и может быть очень значительным. Так как выходное напряжение
пропорционально входному управляющему напряжению, схема может
использоваться как составная часть системы регулирования,
например системы поддержания заданной температуры, если в
качестве нагрузки использовать нагреватель, а датчик
температуры подключить к простейшему пропорциональному регулятору, выход
которого подключается к управляющему входу устройства. Описанные
устройства имеют в основе несимметричный мультивибратор, но ШИМ
регулятор можно построить на микросхеме ждущего мультивибратора, как
показано на следующей странице.
Гораздо лучшими характеристиками обладает вторая схема, но количество
элементов в ней чуть больше. Регулировка эффективного значения
напряжения на нагрузке от 0 до 12 В производится изменением
напряжения на управляющем входе от 8 до 12 В. Диапазон
регулировки напряжения практически 100%. Максимальный
ток нагрузки полностью определяется типом силового полевого
транзистора и может быть очень значительным. Так как выходное напряжение
пропорционально входному управляющему напряжению, схема может
использоваться как составная часть системы регулирования,
например системы поддержания заданной температуры, если в
качестве нагрузки использовать нагреватель, а датчик
температуры подключить к простейшему пропорциональному регулятору, выход
которого подключается к управляющему входу устройства. Описанные
устройства имеют в основе несимметричный мультивибратор, но ШИМ
регулятор можно построить на микросхеме ждущего мультивибратора, как
показано на следующей странице.
Очередное электронное устройство широкого применения.
Представляет собой мощный ШИМ (PWM) регулятор с плавным ручным управлением. Работает на постоянном напряжении 10-50V (лучше не выходить за диапазон 12-40V) и подходит для регулирования мощности различных потребителей (лампы, светодиоды, двигатели, нагреватели) с максимальным током потребления 40А.
Прислали в стандартном мягком конверте

Корпус скрепляется на защёлках, которые легко ломаются, поэтому вскрывать аккуратно.
Внутри плата и снятая ручка регулятора
Печатная плата - двусторонний стеклотекстолит, пайка и монтаж аккуратные. Подключение через мощный клеммник.

Вентиляционные прорези в корпусе малоэффективны, т.к. почти полностью перекрываются печатной платой.
В собранном виде выглядит примерно так
Реальные размеры чуть больше заявленных: 123x55x40мм
Принципиальная электрическая схема устройства
Заявленная частота ШИМ 12kHz. Реальная частота изменяется в диапазоне 12-13kHz при регулировании выходной мощности.
При необходимости, частоту работы ШИМ можно уменьшить, подпаяв нужный конденсатор параллельно С5 (исходная ёмкость 1nF). Увеличивать частоту нежелательно, т.к. увеличатся коммутационные потери.
Переменный резистор имеет встроенный выключатель в крайнем левом положении, позволяющий отключать устройство. Также на плате расположен красный светодиод, горящий в рабочем состоянии регулятора.
С микросхемы ШИМ контроллера маркировка зачем-то старательно затёрта, хотя нетрудно догадаться, что стоит аналог NE555:)
Диапазон регулирования близок к заявленным 5-100%
Элемент CW1 похож на стабилизатор тока в корпусе диода, но точно не уверен…
Как и на большинстве регуляторов мощности, регулирование осуществляется по минусовому проводнику. Защита от КЗ отсутствует.
На мосфетах и диодной сборке маркировка изначально отсутствует, они стоят на индивидуальных радиаторах с термопастой.
Регулятор может работать на индуктивную нагрузку, т.к. на выходе стоит сборка защитных диодов Шоттки, подавляющая ЭДС самоиндукции.
Проверка током 20А показала, что радиаторы греются незначительно и могут вытянуть больше, предположительно до 30А. Измеренное суммарное сопротивление открытых каналов полевиков всего 0,002 Ом (падает 0,04В на токе 20А).
Если снизить частоту ШИМ, вытянут все заявленные 40А. Жаль проверить не смогу…
Выводы можете сделать сами, мне устройство понравилось:)
Планирую купить +56 Добавить в избранное Обзор понравился +38 +85Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться.
ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду.
D = (t/T) * 100%
На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения.
При таком методе управления скорость вращения двигателя будет пропорциональна коэффициенту заполнения ШИМ сигнала.
Простая схема управления двигателем постоянного тока
Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.

Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала.
Схема для генерации ШИМ сигнала
Существует много схем для генерации ШИМ сигнала. Одна из самых простых - это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.
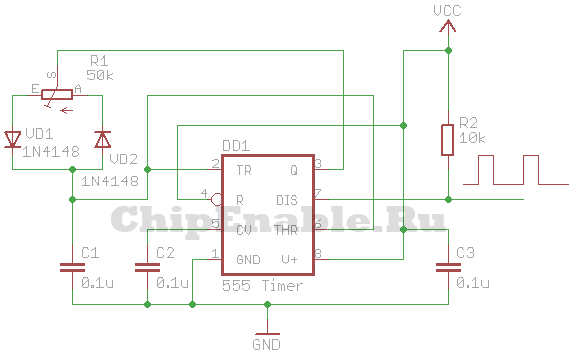
Напряжение питания схемы VCC может быть в диапазоне 5 - 16 Вольт. В качестве диодов VD1 - VD3 можно взять практически любые диоды.
Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.

Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 288 Гц.
ШИМ регулятор оборотов двигателя постоянного тока
Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.д.
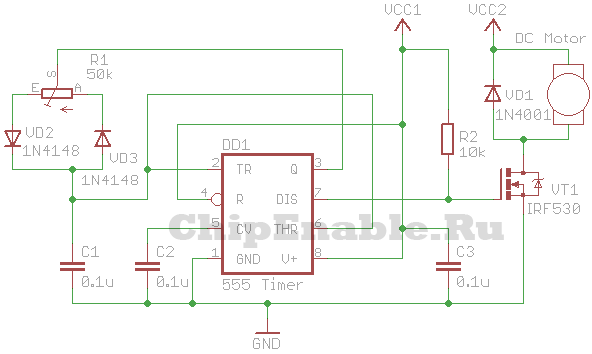
VT1 - полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1.
Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности.
 Полировка авто жидким стеклом краснодар
Полировка авто жидким стеклом краснодар Пассажирские суда на подводных крыльях
Пассажирские суда на подводных крыльях — Выбор велосипедной фары
— Выбор велосипедной фары